ヘルダー平均(ヘルダーへいきん、英語: Hölder mean)、またはべき平均(べきへいきん)、一般化平均(いっぱんかへいきん、英語: generalized mean)、とは、数の集合を集計する関数の族である。特別な場合としてピタゴラス平均(算術平均、幾何平均、調和平均)を含む。名称はオットー・ヘルダーにちなむ。
定義
p を0でない実数とする。正の実数 x1, ... , xn に対して指数 p のヘルダー平均は次で定義される:
p = 0 のときは、幾何平均(指数が0に向かうときの極限)で定義する。
さらに、重み wi (正の数のセット。ただし)に対して重み付きヘルダー平均は次で定義される:
重みを考えない平均は、すべての重みを wi = 1/n としたものに相当する。
特別な場合
いくつかの特定の p の値に対しては、特別の名前が付けられている。
- 最小値
- 調和平均
- 幾何平均
- 算術平均
- 二乗平均平方根
- 立方平均
- 最大値
性質
ヘルダー平均は次の性質をもつ:
- 引数 x1, ... , xn の最小値と最大値の間にある。
- 引数に対して対称である。つまり引数を並べ替えてもその値を変えない。引数の置換演算子を P とすると次式で表される:
- 他の平均と同様、引数 x1, ... , xn に対して斉次である。つまり b を正の実数として次式が成り立つ:
- 準算術平均と同様に、平均の計算は同じサイズのサブブロックの計算に分割できる。これにより、必要に応じて分割統治法を使用して平均を計算できる。
異なるヘルダー平均の間に成り立つ不等式
一般に -∞ ≤ p < q ≤ ∞ ならば
である。また2つの平均が等しいのは x1 = x2 = ⋯ = xn のとき、かつそのときに限る。これはイェンセンの不等式より、任意の実数 p に対して
が成り立つためである。
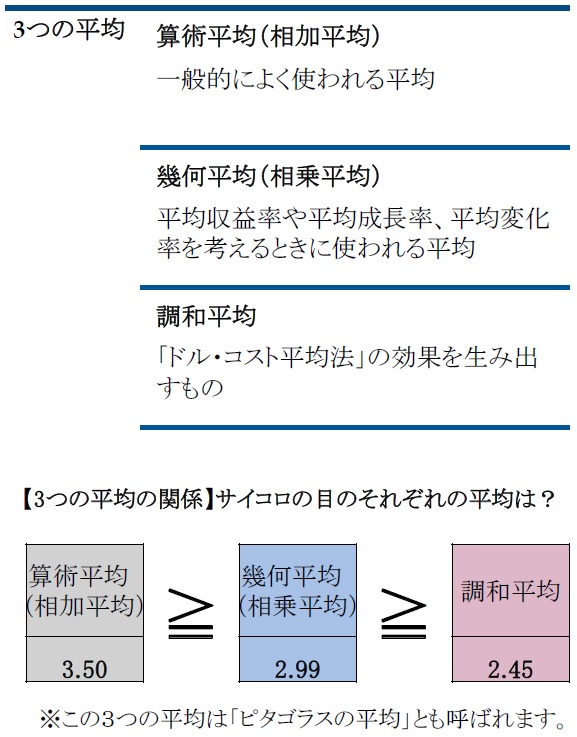
特に p = -1, 0, 1 の場合を考えると、この不等式は調和平均 ≤ 幾何平均 ≤ 相加平均
を意味する。
応用
信号処理
ヘルダー平均より非線形移動平均が導かれる。これは小さい p の場合には小さい信号値を強調し、大きい p の場合は大きい信号値を強調する。移動算術平均の効率的な実装である smooth が使えるならば、次のHaskellコードに従って移動ヘルダー平均を実装できる。
- p が大きい場合、整流された信号の包絡線検波が得られる。
- p が小さい場合、マススペクトルのベースライン検出器が得られる。
一般化 f-平均
ヘルダー平均はさらに一般化 f-平均に一般化できる。
この式は f(x) = log x とすれば、極限を使うことなく幾何平均も表すことができる。ヘルダー平均は f(x) = xp とすることで得られる。
脚注
関連項目
- 算術幾何平均
- 平均
- ヘロニアン平均
- 算術平均と幾何平均の不等式
- レーマー平均 – これもヘルダー平均と同様に冪乗に関係する平均である。
- ミンコフスキー距離
外部リンク
- Power mean at MathWorld
- Examples of Generalized Mean
- A proof of the Generalized Mean on PlanetMath